11
全部商品分类
 毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0
毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0 solidworks2018 中文版¥0
solidworks2018 中文版¥0 CA6140车床拨叉831006零件夹具设计说明书——9页...¥0
CA6140车床拨叉831006零件夹具设计说明书——9页...¥0 机械设计制造及其自动化毕业设计(论文)开题报告...¥0
机械设计制造及其自动化毕业设计(论文)开题报告...¥0 XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0
XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0 课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0
课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0 补价¥1.00
补价¥1.00 毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0
毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0 陈家沟桥梁施工组织设计方案.doc...¥0
陈家沟桥梁施工组织设计方案.doc...¥0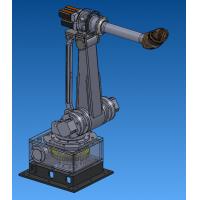 六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00
六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00目 录
第1章 绪论……………………………………………………………………
1.1 机器人概述……………………………………………………………
1.2 机器人的历史、现状…………………………………………………
1.3 机器人的发展趋势……………………………………………………
第2章 机器人实验平台介绍及机械手的设计……………3
2.1自由度及关节……………………………………………………………
2.2 基座及连杆……………………………………………………………
2.2.1 基座………………………………………………………………
2.2.2 大臂………………………………………………………………
2.2.3 小臂………………………………………………………………
2.3 机械手的设计……………………………………………………………
2.4 驱动方式…………………………………………………………………
2.5 传动方式…………………………………………………………………
2.6 制动器……………………………………………………………………
第3章 控制系统硬件……………………………………………………………
3.1 控制系统模式的选择……………………………………………………
3.2 控制系统的搭建………………………………………………………
3.2.1 工控机……………………………………………………………
3.2.2 数据采集卡………………………………………………………
3.2.3 伺服放大器………………………………………………………
3.2.4 端子板……………………………………………………………
3.2.5电位器及其标定…………………………………………………
3.2.6电源………………………………………………………………
第4章 控制系统软件…………………………………………………………
4.1预期的功能……………………………………………………………
4.2 实现方法………………………………………………………………
4.2.1实时显示各个关节角及运动范围控制 ………………………
4.2.2直流电机的伺服控制………………………………………………
4.2.3电机的自锁…………………………………………………………
4.2.4示教编程及在线修改程序…………………………………………
4.2.5设置参考点及回参考点……………………………………………
第5章 总结………………………………………………………………………
5.1 所完成的工作…………………………………………………………
5.2 设计经验………………………………………………………………
5.3 误差分析………………………………………………………………
5.4 可以继续探索的方向…………………………………………………
致 谢………………………………………………………………………………
参考文献…………………………………………………………………………





