11
全部商品分类
 毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0
毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0 solidworks2018 中文版¥0
solidworks2018 中文版¥0 CA6140车床拨叉831006零件夹具设计说明书——9页...¥0
CA6140车床拨叉831006零件夹具设计说明书——9页...¥0 机械设计制造及其自动化毕业设计(论文)开题报告...¥0
机械设计制造及其自动化毕业设计(论文)开题报告...¥0 XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0
XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0 课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0
课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0 补价¥1.00
补价¥1.00 毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0
毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0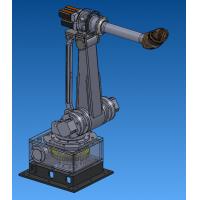 六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00
六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00 陈家沟桥梁施工组织设计方案.doc...¥0
陈家沟桥梁施工组织设计方案.doc...¥0摘 要
摘果机技术毫无疑问是未来的战略性高技术,充满机遇和挑战。目前,国际上摘果机市场大概有80亿至100亿,其中工业摘果机占的比重最大。2025年,整个摘果机市场将达到500亿,服务摘果机从原来的300多万台增加到1200多万台,特种摘果机(如:农业摘果机、排爆摘果机、医疗摘果机等)的呼声也越来越高。另外,微软等IT企业,丰田、奔驰等汽车公司,甚至还有家具、卫生洁具企业都纷纷参与摘果机的研制。
本课题来源农业相关摘果机——摘果机。随着摘果机技术的发展国内外开始探索相关技及先进成果应用在农业领域,其中果实采摘收割摘果机是农业领域中相对大的比重,相关摘果机随着技术进步及相关经验的成熟会为人们解放劳动力、提高工作效率等方面有不可估量的前景。
本文运用大学所学知识,设计了一款轮式摘果机,本摘果机通过轮式底部结构可自由行进并用5轴式机械臂结构可有效采摘果树上的苹果。为进一步探索苹果采摘相关摘果机的研发提供了相关经验及依据,并对进一步论证相关技术有了实验的摘果机。
关键字:摘果机、农业,苹果采摘,轮式摘果机
Abstract
Robotics is undoubtedly a strategic high-tech future, full of opportunities and challenges. Currently, the international market, there are about robot 8 to 10 billion, which accounts for the largest proportion of industrial robots. 2025, the entire robot market will reach 50 billion, the service robot from the original more than 300 million units to 12 million units,Special robot (eg: agricultural robots, EOD robots, medical robots, etc.) are increasingly vocal. In addition, Microsoft and other IT companies, Toyota, Mercedes-Benz and other car companies, and even furniture, sanitary ware enterprises have involved in the development of the robot.
The sources of agriculture-related topics robot - apple picking robots. With the development of robot technology at home and abroad began to explore the application of relevant technologies and advanced achievements in the field of agriculture, where the fruit harvest picking robot is agriculture relatively large proportion of the relevant robot as technology advances and experience of mature people will liberate labor force improve work efficiency and so have immeasurable prospects.
In this paper, the university is knowledge, designed a wheeled robot apple picking, apple picking this wheeled robots can travel freely and bottom structure with a 5-axis robot arm structure can effectively picking apples fruit trees. To further explore the development of apple picking robot provides relevant and in accordance with relevant experience, and further related technology demonstration experiments with robots.
Key words: Robot,A
griculture,Apple picking ,Wheeled robot
目 录
摘要 I
Abstract II
1.1课题的来源与研究的目的和意义 1
1.2摘果机的用途 2
1.3采摘果机的特点 2
1.4本课题研究的内容 3
2.2摘果机的工作原理 10
3 摘果机部分零部件选型及校核 12
2.3.1部分电机计算 14
2.3.2联轴器的选型 16
2.3.3轴承的选型计算 18
4.1总体结构三维建模 20
4.2底部轮式车三维建模 20
4.3电动气缸的三维建模 21
结论 22
致谢 23
…………









