11
全部商品分类

 毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0
毕业设计辅助工具_免费论文文案文章修改神器_毕业设计辅助软件_论文查重...¥0 solidworks2018 中文版¥0
solidworks2018 中文版¥0 CA6140车床拨叉831006零件夹具设计说明书——9页...¥0
CA6140车床拨叉831006零件夹具设计说明书——9页...¥0 机械设计制造及其自动化毕业设计(论文)开题报告...¥0
机械设计制造及其自动化毕业设计(论文)开题报告...¥0 XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0
XX大学理工类毕业设计(论文)开题报告——自行车配件管理系统...¥0 课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0
课程设计 CA6140车床拨叉831002的加工工艺及钻φ25孔的钻床...¥0 补价¥1.00
补价¥1.00 毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0
毕业设计辅助工具_免费在线论文文案文章修改神器_毕业设计辅助软件_AI...¥0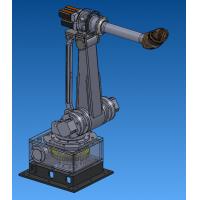 六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00
六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWork...¥45.00 陈家沟桥梁施工组织设计方案.doc...¥0
陈家沟桥梁施工组织设计方案.doc...¥0
机器人技术是机电一体化产品,码垛机器人成为一个领先的研究课题。运用在不同领域,如机械,电子,信息理论,人工智能,生物学和计算机,知识等诸多领域的发展机械接头端的设计,机器人也导致了这些学科的发展。码垛型机器人是一种典型的机电一体化产品,工艺多码垛运动的一个热点手臂运动更多的领域进行合作研究。机械,电子,信息理论,人工智能,知识和生物和计算机许多学科,但其发展的多机构衔接所需组合码垛也促成了这些学科的发展。
本文采用在结构设计上的轻质石膏墙板码垛机械手,并完成图纸和零件图总装配图。为机器人模型的要求被分析以估计电机的每个码垛,充分的设得所需要的转矩和功率。完成码垛型机器人的程序设计,总体设计,结构设计,运动学模型操盘分析,检查,分析机器人模型,设计和生产机器人模型做的过程中强度的关键部件,绘制3D图。
关键词:机械臂,结构设计,轻质石膏墙板码垛机械手,电机
Robot technology is an electromechanical integrated product, and palletizing robots have become a leading research topic. The development of mechanical connectors in various fields such as mechanics, electronics, information theory, artificial intelligence, biology and computer science, knowledge, and the design of robots have also led to the development of these disciplines. Stacking robots are a typical mechatronic integrated product, which is a hot topic in the field of multi stacking motion. Collaborative research on arm movement is being conducted in more fields. Many disciplines, including mechanics, electronics, information theory, artificial intelligence, knowledge, biology, and computer science, have also contributed to the development of these disciplines due to the combination and stacking required for their multi institutional connections.
This article adopts a lightweight gypsum wall panel stacking manipulator in structural design, and completes the overall assembly drawing of the drawings and parts. The requirements of the robot model are analyzed to estimate the required torque and power for each pallet of the motor, with sufficient settings. Complete the program design, overall design, structural design, kinematic model manipulation analysis, inspection, and analysis of the palletizing robot model. Design and produce key components for the strength of the robot model during the process, and draw 3D diagrams.
Keywords: robotic arm, structural design, lightweight gypsum wall panel palletizing robot arm, motor
目 录
……








