11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 CAD字体¥0
CAD字体¥0 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0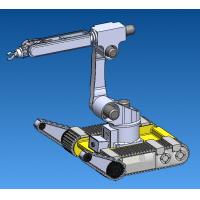 灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00
灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00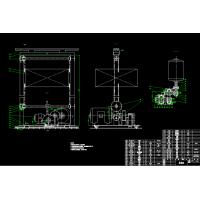 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00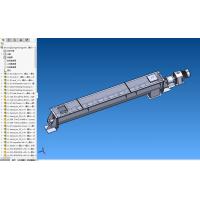 毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00
毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.002.4.1将SolidWorks创建的简化三维实体模型导入ADAMS
机器人焊接装配线是汽车车身焊接装配车间的一个非常重要的组成部分,是一个汽车制造厂车身焊接工艺水平的体现,在一定程度上也是一个国家汽车制造技术的标志。机器人焊装线的应用,降低了工人的劳动强度,提高了劳动生产率,改善了产品质量,并且大大提高了车身制造水平,是国内汽车行业发展的必然趋势。
本文主要的研究内容和所达到的目标如下:
首先,了解工业机器人的国内外现状和发展前景,明确焊接机器人(尤其是应用于汽车车身的焊接)的设计意义和功能要求,掌握了工业机器人的结构特征与常见传动方案,为设计汽车车身焊接机器人做了相应知识准备和技术储备。
其次,对焊接机器人主要部件进行Solidworks三维实体简化建模,并将其导入虚拟样机设计软件ADAMS中,进行整机的虚拟样机运动仿真,优化并最终确定了焊接机器人的各部件尺寸参数和外形特征,以及获得一些重要的优化参数和工作信息。
再次,根据所确定的焊接机器人的外形特征和尺寸,结合工业机器人常用的传动方案,最终确定本产品的传动方案和动力供给方案,并选取了合适的电机,对组成焊接机器人的所有部件完成了Solidworks三维实体细节建模,最后装配成实体。
最后,应用Autocad软件完成焊接机器人各主要部件和装配体的二维工程图绘制,确定各主要部件的材料以及加工技术要求。基于SolidWorks Simulation,对焊接机器人的关键零件进行形变和应力的有限元分析,校核其刚度和强度,以检验设计的合理性和零件使用的安全性。
关键词:焊接机器人;虚拟样机运动仿真;结构设计;传动设计;三维建模;有限元分析
…………
…………








