11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 CAD字体¥0
CAD字体¥0 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0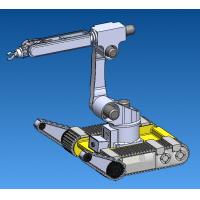 灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00
灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00 毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00
毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00目录
摘要3
Design of fruit picking manipulator4
第1章 绪论5
1.1 课题研究背景及意义5
1.2 国外研究成果及现状5
1.2.1 国外采摘机器人成果及现状6
1.2.2 国外末端执行器研制进展情况7
1.3 国内研究成果及现状8
1.4 主要研究的内容8
第2章 柑橘采摘机器人机械手机构设计10
2.1 小型柑橘的生物学特征10
2.2 采摘机器人选型原则11
2.3 柑橘采摘机器人机械手的选型12
2.4 本章小结13
第3章 柑橘采摘机器人总体结构方案设计14
3.1 可移动小车底盘15
3.2 升降梯15
3.3 柑橘采摘机械手臂16
3.4 柑橘采摘执行末端17
3.5 电控系统17
3.5.1 控制系统17
3.5.2 视觉系统17
3.6 本章小结18
第4章 执行末端的设计19
4.1 柑橘采摘末端执行器设计的总体原则19
4.2 设计三维软件Solidworks简介19
4.3 连杆机构设计方案19
(1) 铰链四杆机构20
其中21
(2) 柑橘采摘末端执行器模型建立22
则此时切割力24
4.4 半球式设计方案26
4.5 半齿设计方案26
4.5.1 齿轮传动的计算载荷28
4.6 三种方案的优缺点分析30
4.7本章小结31
第5章 柑橘采摘机械手运动分析32
5.1 柑橘采摘机器人机械手运动学分析32
5.1.1 运动学正解33
5.1.2 反解验证34
5.1.3 机械手雅可比矩阵的求解34
5.1.4 机械手速度和加速度正解分析36
5.2 柑橘采摘机械手零件理论分析36
5.2.1 机械零件疲劳极限的因素36
5.2.2 带传动分析38
5.3 本章小结39
第6章 机械手末端执行器有限元分析40
6.1 连杆机构末端执行器模态分析40
6.2 半球式设计末端执行器模态分析42
6.3 半齿设计末端执行器模态分析44
6.4 模态分析总分析46
6.5 本章小结47
第7章 总结与展望48
参考文献49
致谢51

果实采摘机械手的设计
摘要:果实采摘工作具有较强的复杂性和较低的自动化程度,目前国内水果的采摘工作主要靠手工完成。21世纪是农用机械化向智能自动化机械过渡的关键时期,工业智能自动化对现代农业发展规模化、多样化和精确化十分重要。本文针对小型柑橘进行采摘机械手的设计,实现果实的全程自动化采摘。
本文通过对果实采摘机械手的采摘环境和采摘特点进行分析,提出一种六自由度小型柑橘采摘串联机械手。通过设计3种末端执行器机械结构,使得机械手具有多用途作用,并将机械手与相关辅助装置相结合,实现整个柑橘果园采摘过程的自动化。该机构解决了人们采摘高处果实难、果实采摘工作量大和人工采摘具有一定危险性等缺点,实现了小型柑橘等多种果实不受物理损伤的自动化采摘。
关键词:工业机器人;果实采摘机器人;机械手;
…………










