11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 CAD字体¥0
CAD字体¥0 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0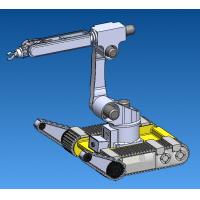 灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00
灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00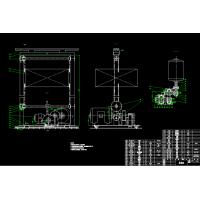 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00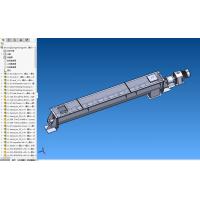 毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00
毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种PLC控制的圆柱坐标形式数控机床上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计,机械手腕部的结构设计,末端执行器(手爪)的结构设计,机械手的机械传动机构的设计,机械手驱动系统的设计。同时对液压系统进行了理论分析和计算。
关键词: 机械手; PLC; 液压伺服定位; 电液系统; 数控机床
With the popularization and development of industrial automation, control demand increased year by year, carrying manipulator application also gradually popular, mainly in the automotive, electronics, machinery, food, medicine and other fields of production lines or cargo transport, can be better to save energy and improve the efficiency of transport equipment or products, in order to reduce other handling the limitation and inadequacy, meet the needs of modern economic developmentIntegrate the knowledge of the past four years’ of undergraduate course of Machine, discuss and analysis the each part and function of manipulator; design a kind of the PLC control cylinderical coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end effector and the control system etc. including Total design, waist’s construction design, the arm’s construction design, the wrist’s construction design, the end effector’s construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system.
Keyways: Manipulator; PLC; Hydraulic servo control; Electrohydraulic system;Numerical control machine tools
目 录
机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计是非常有意义的。
本设计通过对机械工程专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的数控机床上下料机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
本机械手主要与数控车床(数控铣床,加工中心等)组合最终形成生产线,实现加工过程(上料、加工、下料)的自动化、无人化。目前,我国的制造业正在迅速发展,越来越多的资金流向制造业,越来越多的厂商加入到制造业。本设计能够应用到加工工厂车间,满足数控机床以及加工中心的加工过程安装、卸载加工工件的要求,从而减轻工人劳动强度,节约加工辅助时间,提高生产效率和生产力。
……………………
……………………
……………………



